| |
| 大气参数与成分测量激光雷达 |
| |
| 一、简介 |
| 近年来由于我国工业化的大发展,大气污染和灾害天气影响日益严重。在国际上我国也面对大气污染以及温室气体排放等诸多指责。中国作为负责任的发展中大国,一方面对外来的恶意攻击要给予义正严词的有力还击,同时也要制定切实的可持续发展策略。根据可持续发展战略的要求,我国政府制定了一系列的节能降耗、减排,保护环 境,应对气候变化的政策。
中科院安徽光学精密机械研究所大气光学中心激光雷达探测技术研究室,在光、机、电和大气光学研究方面具有综合优势,致力于对流层大气参数和成分监测激光雷达的研究开发,在科技部、科学院以及北京国科世纪激光有限公司的支持下,于2001年成功研制了国内第一台车载式测污激光雷达样机和我国第一台实用型车载大气环境监测激光雷达,用于测量我国各个地区的对流层低层SO2、O3、NO2浓度和气溶胶的空间分布。率先研制了国内第一台基于纯转动拉曼测温激光雷达,开发了国内第一台全球第二台测量CO2的拉曼激光雷达。
大气环境激光雷达、CO2激光雷达和测温激光雷达多次参加由气象和环保部门组织的联合观测实验,2004年9月-11月参加“北京光化学烟雾形成机理”实验。2004年底和2005年初参加“ 广东地区冬季大气环境监测”实验;2005年8月-10月参加大气污染激光雷达观测实验;2006年 8月-9月参加“北京及周边大气环境观测”项目。目前,参加科技基础性工作专项“我国东部整层大气重要参数高分辨垂直分布探查”的测量任务。 |
| |
| |
|
| |
| 1、测量原理 |
| 利用大气对激光的Mie弹性散射原理和差分吸收(DIAL)测量技术,测量大气污染物浓度空间分布。采用自行研制的受激拉曼激光系统,用于测量对流层底部SO2、NO2 、O3和气溶胶的空间分布 。 |
| |
| |
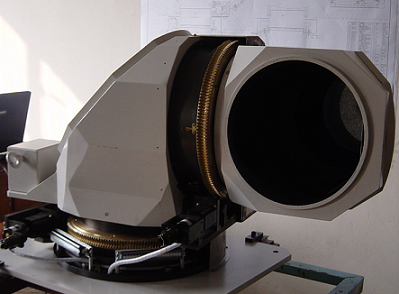
| 2、系统构成 |
| |
| |
|
|
发射系统、三维扫描系统、接收和控制系统 |
|
| |
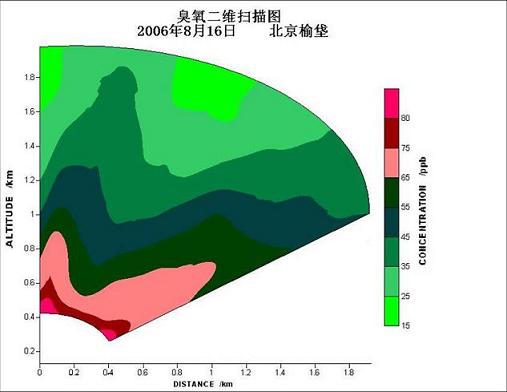
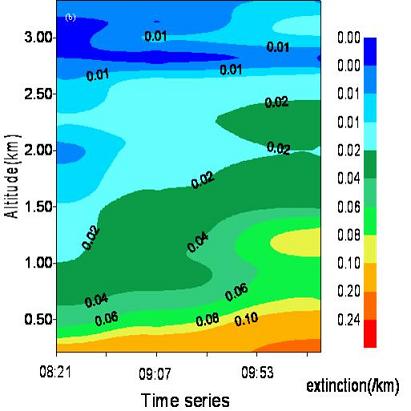
| 3.测量结果 |
| |
污染物空间分布和时间演化图 |
| |
|
| |
| |
| |
|
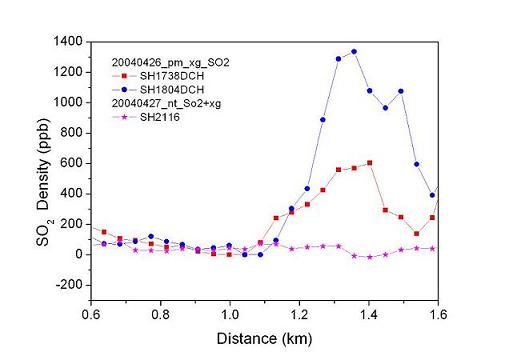
激光雷达监测电厂SO2排放 |
| |
| |
| |
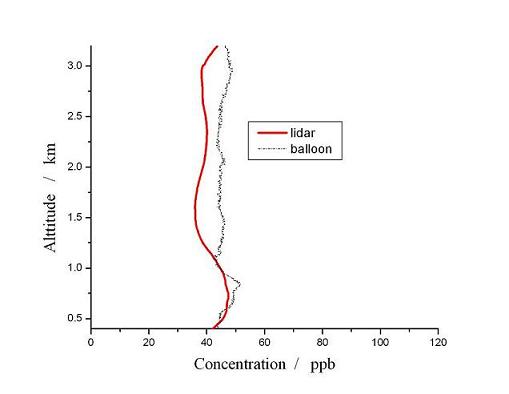
合肥NO2含量垂直廓线 |
| |
|
|
| 1.测量原理 |
基于Raman散射原理对大气中二氧化碳含量进行测量。采用Nd:YAG激光器的三倍频激光(波长354.7 nm)为 激发光源,通过导向镜发射到大气中,利用接收望远镜接收后向散射回波信号,并且采用高性能滤光片实现CO2 Raman信号和氮气Raman信号的有效提取,然后经光电倍增管、放大器后由光子计数器进行甄别计 数。最后对采集的回波信号进行数据处理得到大气中CO2浓度分布廓线。
|
|
| 2.探测性能 |
Raman激光雷达二氧化碳滤光片性能参数 |
|
要求的指标 |
实测值和理论值 |
备注 |
峰值透过率 |
>45% |
64% / 59% |
|
峰值波长(nm) |
371.66-371.78 |
371.71 / 371.68nm |
|
半峰值带宽 |
0.4+/-0.1nm |
0.46nm |
|
200-1100nm |
OD 5 |
OD 5 |
测量值 |
375.4nm |
>OD 7 |
OD 7.4 |
理论值 |
386.7nm |
>OD 7 |
OD 10.3 |
理论值 |
580nm |
>OD 7 |
OD 23.6 |
理论值 |
607.4nm |
>OD 7 |
OD 27.8 |
理论值 |
354.7nm |
>OD 12 |
OD 20.5 |
理论值 |
532.1nm |
>OD 12 |
OD 17.8 |
理论值 |
|
| |
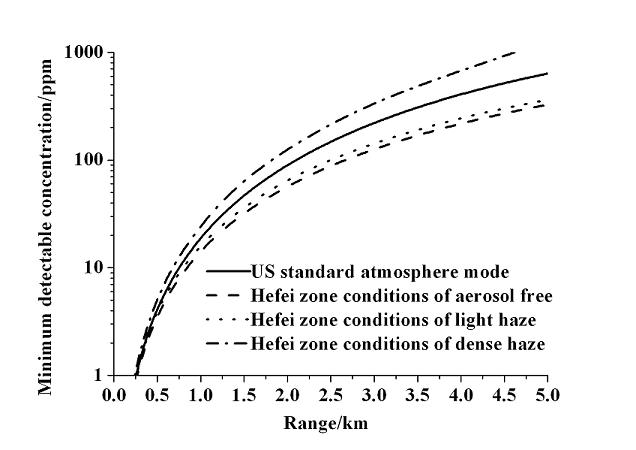 |
| Raman激光雷达不同天气状况下垂直最小可探测浓度 |
| 3.测量结果 |
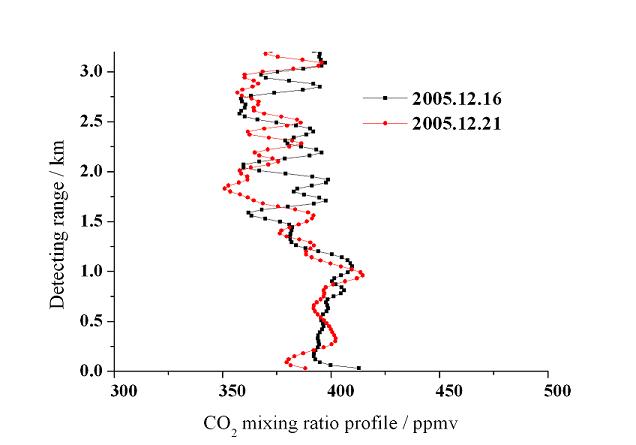
| 探测对流层大气CO2含量分布Raman激光雷达于2005年5月份初步搭建完成,实现了对流层底部CO2含量的测量,初步得到了合肥地区CO2垂直分布的结果。 |
|
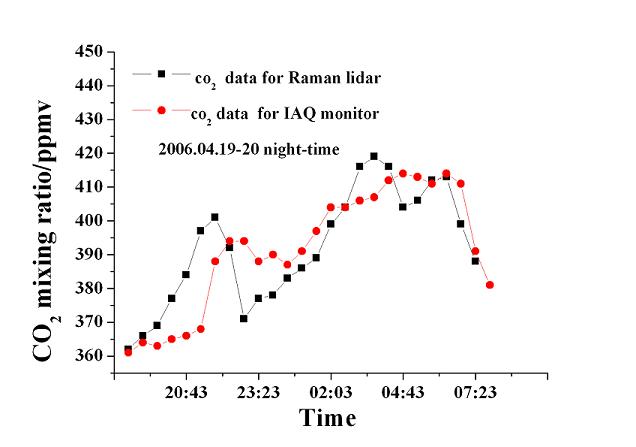
合肥地区垂直CO2浓度夜变化特征 |
| |
| |
垂直方向上两组CO2浓度探测曲线 |
| |
|
激光雷达与IAQ测量结果对比图 |
| |
|
| 1.原理及用途 |
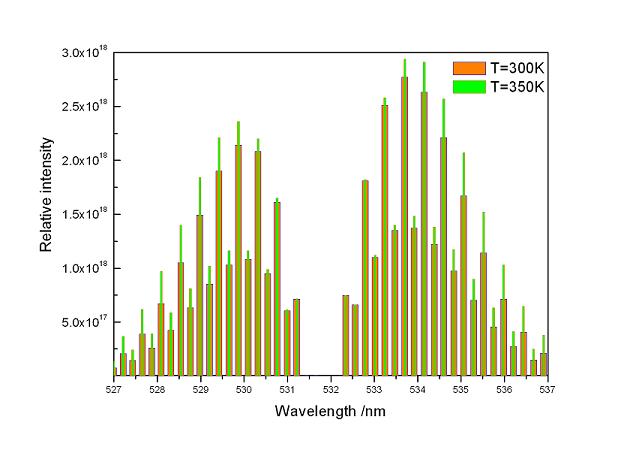
探测原理:大气分子N2或O2纯转动拉曼散射与大气温度密切相关。该激光雷达发射532nm激光,接收大气中N2J= ±6,J=±12的纯转动拉曼谱线,从而反演大气温度分布廓线。
用途:纯转动Raman测温激光雷达探测的是大气N2纯转动Raman散射信号,不易受到大气对流层气溶胶的影响,所以该激光雷达主要用于大气对流层温度的测量,同时可以探测气溶胶散射比。 |
| |
|
N2在300K和350K的纯转动拉曼谱 |
| |
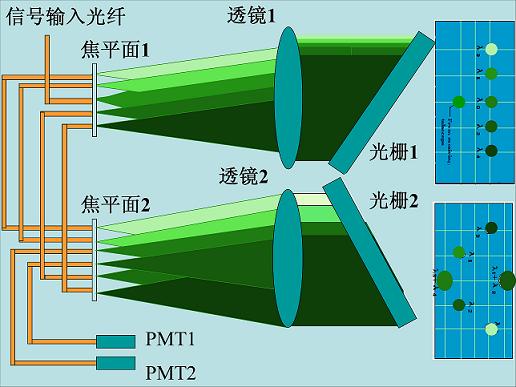
| 2.激光雷达系统结构 |
| |
|
纯转动Raman雷达系统,采用双光栅分光,对Mie散射光可以达到10-7的抑制比
|
| |
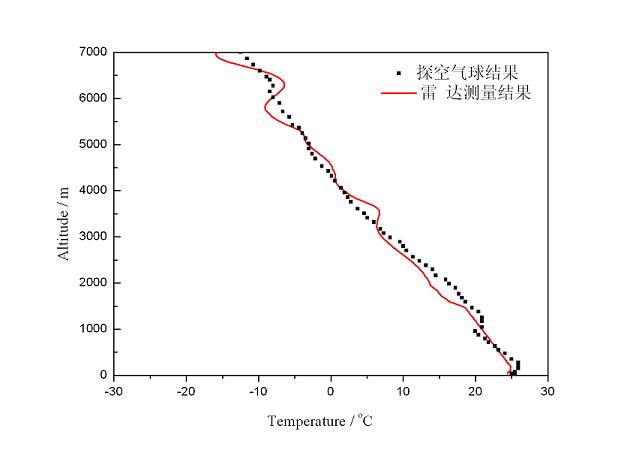
| 3.数据展示 |
|
|
低层大气温度垂直廓线
|
|
| |
|
|
|
|
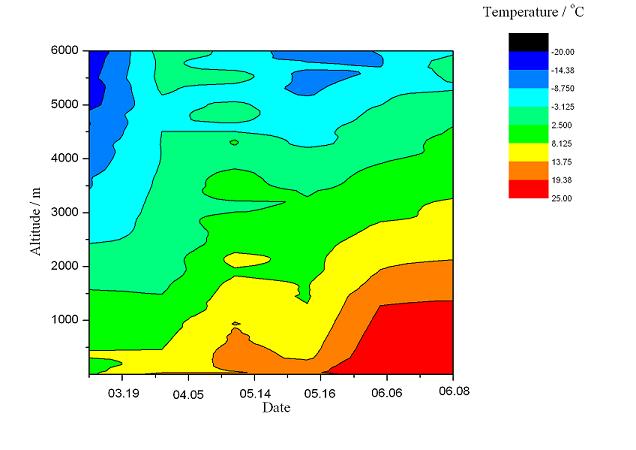
低层大气温度日变化 |
|
| |
|
|
|
|
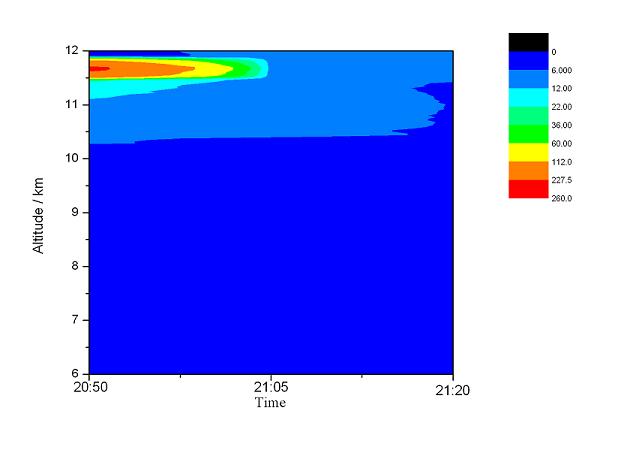
卷云后向散射比时空图 |
|